Gravitational Orbital Dynamics
Version : 1.0
Author(s) : Filippo Portera (fportera@oink.dsi.unive.it) , Claudio Rossi (crossi@moo.dsi.unive.it)
License : GPL
Website : http://dsi.unive.it
Installs from Open Source Astronomy for Win32/Cygwin cd 1
Disk space required for installation is 291.00 Kb
After the package is installed it can be accessed using the command
/opt/astro/bin/startgod
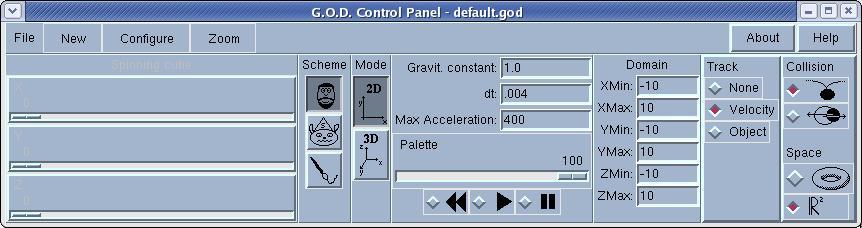
MENU BAR
-FILE: SAVE a system to disk, OPEN one previously saved on disk, or EXIT the program
-NEW: creates a new configuration (see below for more)
-CONFIGURE: configures the system When you choose this option a new edit window will appear with the current system. The default editor is joe, but you can change it uncommenting the appropriate line in the proc called by the config button command.
-ZOOM: zooms a region of the space 2D mode: choose the ZOOM menu-bar option, then select the region to zoom by clicking the left mouse button in the top-left corner of the region; move the cursor to the bottom-right corner, then click again. The region selected will be zoomed to fit the window. 3D mode: sorry, still under development HOW TO UNZOOM: press the pause button, then the zoom menu button.
CONTROL SECTION
SPINNING CUBE These three scales set the viewpoint. They are active only in 3D mode.
MODE These buttons select the display mode: 2D or 3D
SCHEME These buttons choose the numeric scheme used to compute the objects' positions. There are 3 schemes: Prof., sucker and art. The first is the correct one, the others are modifications that generate very interesting drawings.
PARAMETERS Gravitational const. : sets the gravitational constant dt : time step for numeric integration max acc. : maximum acceleration allowed for the objects
PALETTE This scale sets the palette of colors to use to draw objects' trajectories
REW/PLAY/PAUSE buttons The play button starts simulation, or restart it after that the pause button has been pressed; the pause button suspends simulation (e.g., to change some parameters); the rew button "rewinds" the system to its initial configuration.
DOMAIN Entries to set the integration domain
TRACK You can choose to track trajectories with a color proportional to the VELOCITY You can choose to track trajectories with a color proportional to the VELOCITY of the object, to use a different color for each OBJECT, or not to track trajectories (NONE -- this is not too much interesting, but allows you to change the viewpoint while the system is running...)
COLLISION You can choose what have to happen when two objects collide. They may never collide (treated as 0-dimensional points) have an elastic collision (not too realistic, but very funny ! :-).
SPACE This sets the kind of space where the system runs. It can be a real space (RxR or RxRxR -- depend on the mode selected) or an hipertoroidal space, that is when an object exits the space from one side it will re-enter it by the opposite side.